Модели роботов своими руками

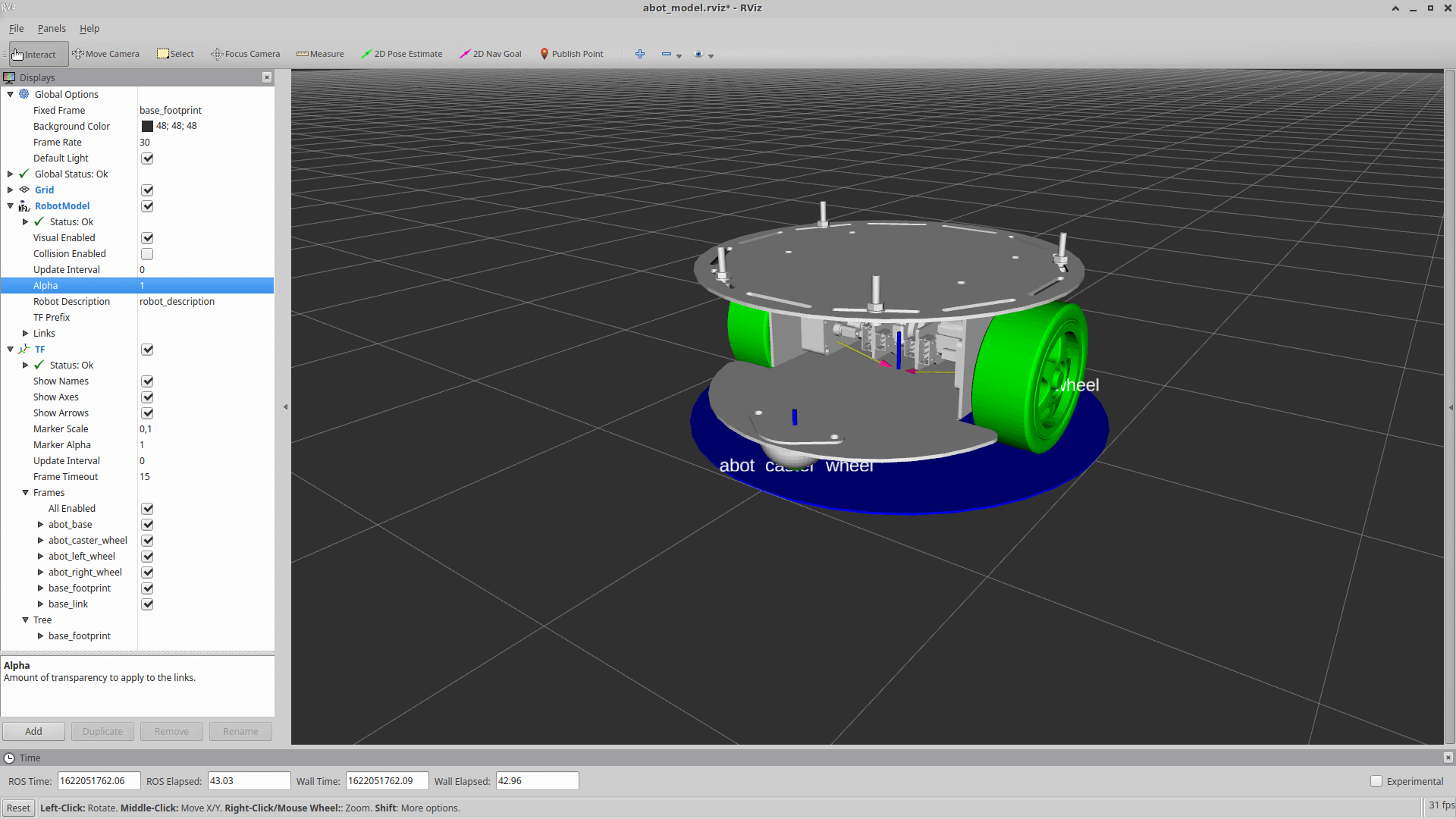
Как сделать робота на ROS своими руками. Часть 2: дистанционное управление и навигация
Реферат рассказывает о различных простых моделях роботов на колесах с элементами управления. Описываются самодельные проекты роботов, такие как модель Lego WeDo 2. Также в реферате рассматриваются конструкторы роботов, предлагающие собирать разнообразные модели, включая роботов на колесах. Все модели имеют различные элементы управления, что делает их универсальными в использовании.











Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях. Эта история началась почти год назад. Сидели мы как то с другом и подумали, «а что если сделать систему, для игры через интернет?
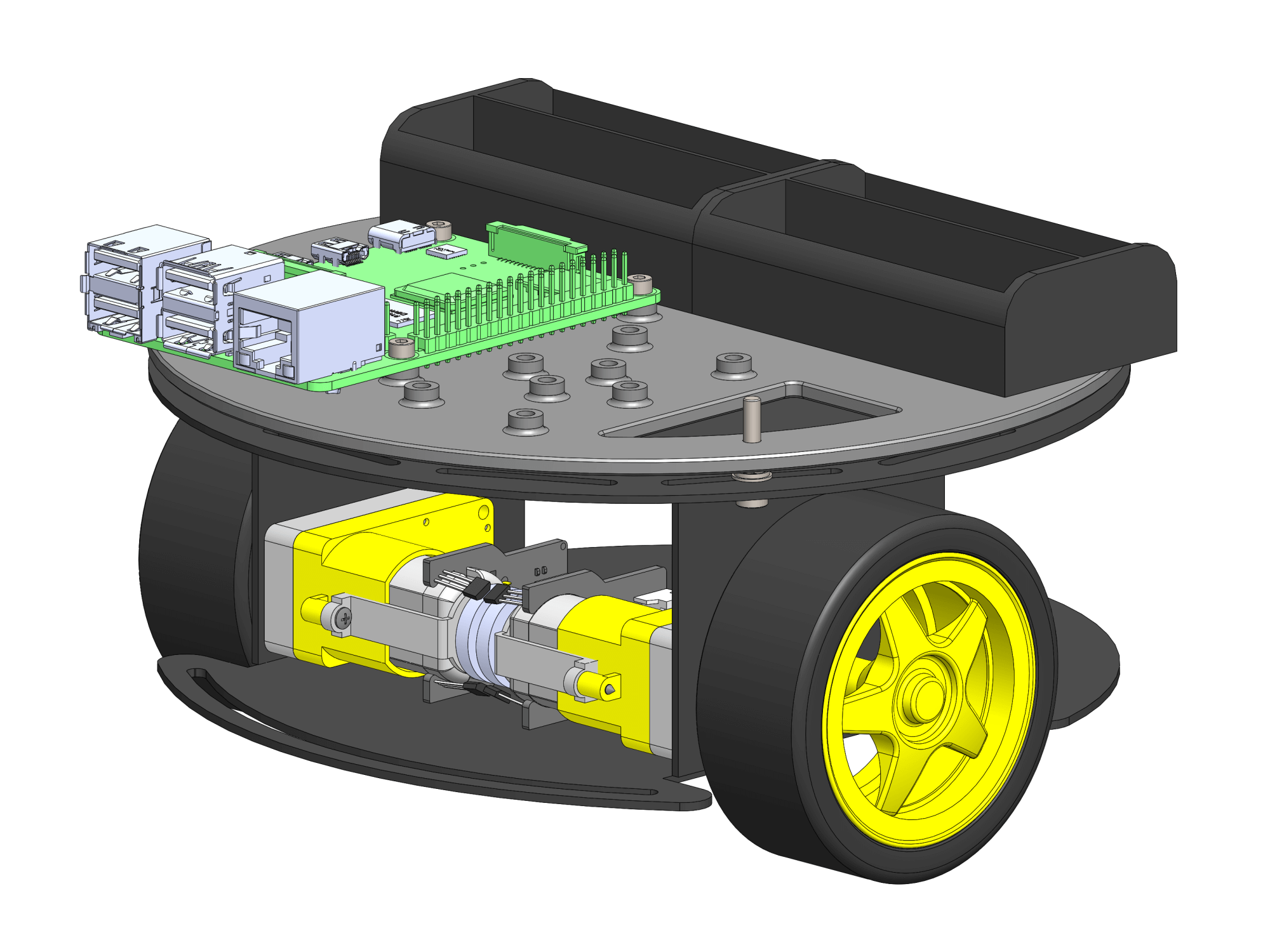







В прошлой части проекта мы создали шасси мобильного робота на ROS и запрограммировали управление движением. А ещё через плагин неудобно поворачивать роботом во время движения. Нам нужно удобное дистанционное управление роботом. В будущем наш робот будет ездить самостоятельно.


Похожие статьи
- Вязание спицами узоры и схемы листиками - Вязание спицами » Вязание крючком и спицами схемы и модели
- Украшение диванной подушки своими руками - Дом, мебель, интерьер. / Самоделка. net - Сделай сам свои
- Самодельные буровое установка
- Своими руками авто лампочки на светодиоды - Автосамоделки - сделай сам самоделки для авто своими рук